Краткая справка по созданию карт
Чтобы создать карту для симуляции, выполните следующие действия:
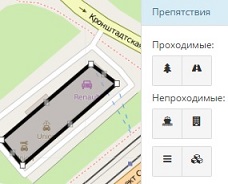
Разметьте препятствия (здания, растительность) и существующие пешеходные дорожки с помощью инструментов на панели справа.
Все, что не является препятствием или дорожкой, считается газоном.
Чем точнее вы разметите территорию, тем лучше и реалистичнее будут результаты симуляции! Иногда даже наличие или отсутствие одного дерева на газоне может серьезно повлиять на результат.
Сама OSM-карта служит лишь подложкой и ориентиром. В симуляции будут использованы только заданные вами объекты. Если вы хотите использовать OSM-данные напрямую, выберите при создании карты пункт "Импорт OSM".
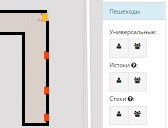
Укажите генераторы пешеходов.Это места, между которыми будут передвигаться люди: подъезды, входы магазинов, остановки общественного транспорта и любые другие интересные для пешеходов точки.
Генераторы могут быть двух размеров в зависимости от трафика.
Нажмите кнопку Отправить карту на обработку вверху. Вы получите ID, по которому сможете просматривать карту и результаты симуляции с помощью формы в заголовке сайта. В результатах красным цветом будут отмечены те места, где пешеходы, вероятнее всего, будут вытаптывать газоны.
На симуляцию может потребоваться несколько часов или даже больше времени, если в очереди много карт или ваша карта большая.
